mkdir bot_ws
cd prubot
mkdir src
cd src
catkin_create_pkg sanbot roscpp urdf
cd ..
catkin_make
cd src/sanbot/
mkdir urdf
mkdir launch
cd urdf
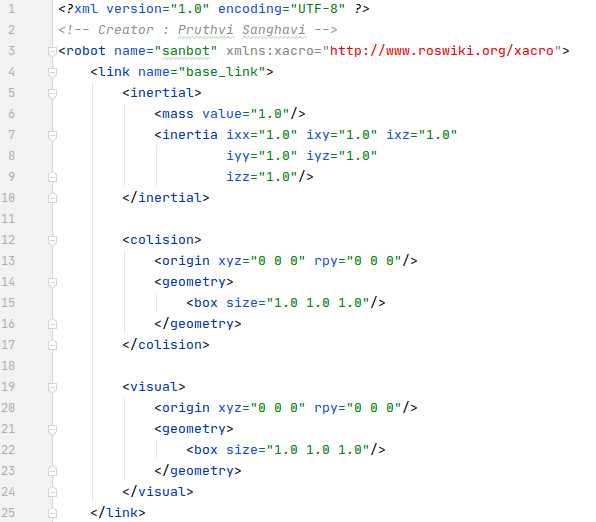
touch description.urdf
cd ..
cd launch
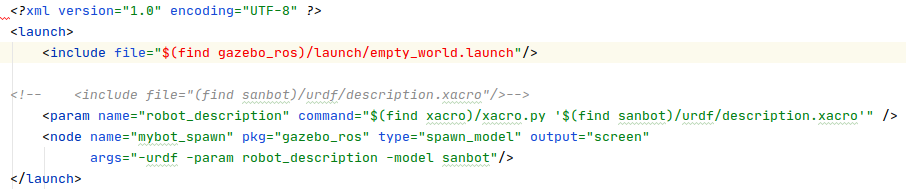
touch gazebo.launch
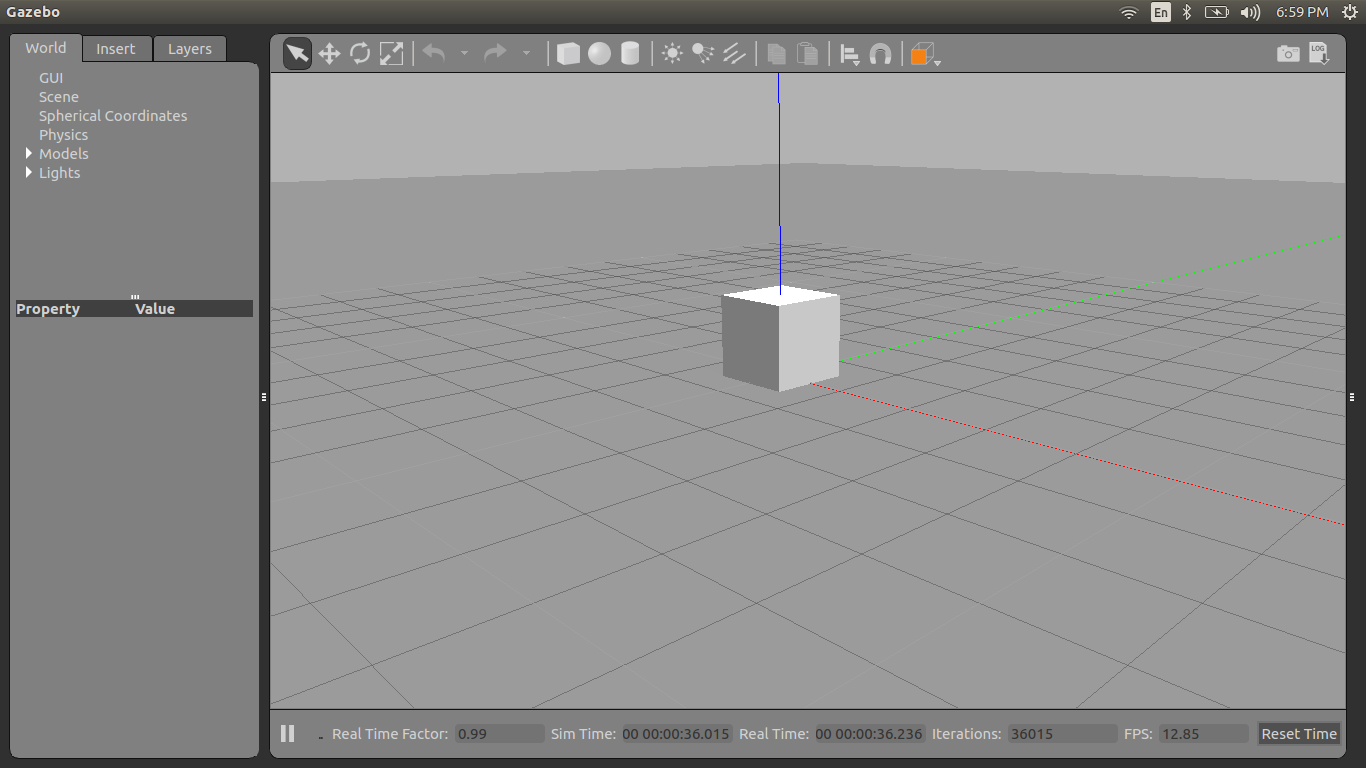
The code written in the code block spawns a cube in gazebo simulator.
A launch file is created to launch the description of the robot
Step 2: Designing a Custom Robot in Solidworks and Exporting it to URDF